応力テンソル
メッシュが切れたあとは、荷重や変位拘束などの境界条件を設定し、その条件における全節点の変位を求めます。有限要素法では、その求めた変位から、反力やひずみ量、応力などを求めることができます。つまり、節点の変位を求めることが目下の目標というわけです。
ここでおさらいですが、工学系の学校では最初にフックの法則を習います。フックの法則は\( \sigma = E \varepsilon\)でしたね。\(\sigma\)は応力で、\(E\)はヤング率(縦弾性係数)、\(\varepsilon\)はひずみです。
ところで、この式は、物体に対して一方向にのみ生じる応力と、一方向のみのひずみとの関係を表しているのですが、応力というのは、どの断面で応力を評価するのかによって変わります。荷重方向に対して垂直な面で応力を見れば、一方向の垂直応力しか生じません。しかし、斜めに切断した断面で見れば、垂直応力に加え、面をスライドさせるようなせん断応力も生じます。
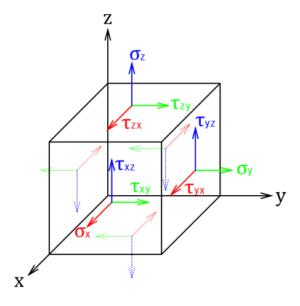
このように、物体に生じる応力を一般的に表すならば、その応力は、任意の座標系を置いたときの、各方向の垂直応力とせん断応力とに分力することができます。これを図で表すと下図のようになります。
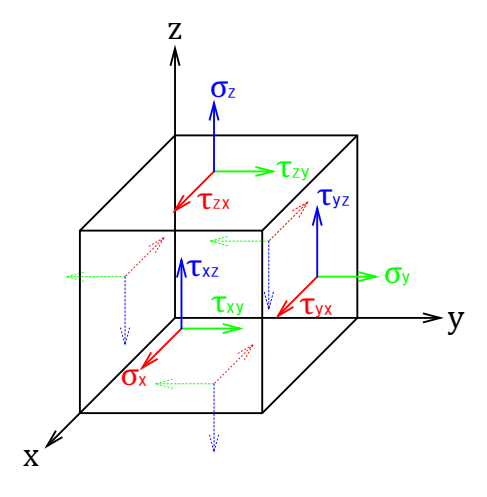
この図では、何かしらの荷重等が作用して微小な立方体部分に応力が生じる場合に、どの方向のどの種類の応力が生じるかを示しています。x方向については、赤色の矢印の垂直応力\(\sigma_x\)とせん断応力\(\tau_{yx}\)、\(\tau_{zx}\)の3つが生じます。y方向については、緑の矢印の垂直応力\(\sigma_y\)とせん断応力\(\tau_{xy}\)、\(\tau_{zy}\)の3つが生じます。z方向については、青色の矢印の垂直応力\(\sigma_z\)とせん断応力\(\tau_{xz}\)、\(\tau_{yz}\)の3つが生じます。合計で9つです。
このように形状、大きさ、向きの3つの情報を持った物理量を「テンソル」ということから、上記のような応力をまとめて「応力テンソル」といいます(正確には2階のテンソル)。ちなみに、大きさ、向きの2つの情報を持った物理量は「ベクトル(1解のテンソル)」、大きさのみの1つの情報を持った物理量を「スカラー(0階のテンソル)」といいます。冒頭のフックの法則に使われている応力\(\sigma\)はスカラーです。
さきほど、応力テンソルは9つの応力があると書きました。しかし、応力テンソルのうち、せん断応力の6つはそれぞれ対称となって半分は省略して考えることができます。これを対称性といいます。
つまりこういうことです。物体の中心を通る軸周りのモーメントを考えたとき、各応力によって生じるモーメントは、釣り合っていなければなりません。そうしないと、クルクル回ってしまうことになるからです。例えば、物体の中心を通るz軸周りのモーメントを考えてみます。この場合、下図のせん断応力がモーメントを生じさせます。
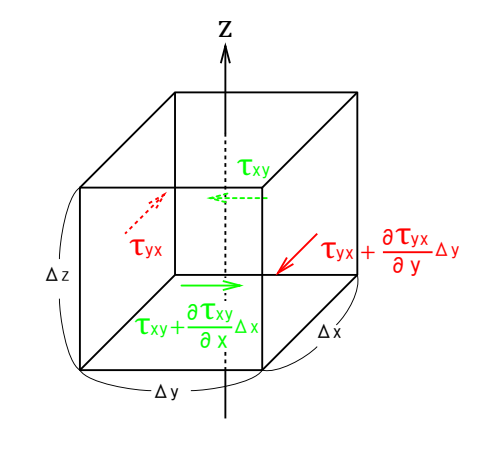
まず、緑色のせん断応力について考えると、奥側の面に生じる応力を\(\tau_{xy}\)とすると、応力が生じている面積\(\Delta y \Delta z\)を掛けて荷重とし、中心のz軸からの距離\(\frac{\Delta x}{2}\)を乗じてモーメントとすれば、
$$ \tau_{xy} \Delta y \Delta z \displaystyle\frac{\Delta x}{2} \tag{1} $$
となります。次に、手前側の面に生じる応力は、奥側の面よりも\(\Delta x\)だけズレていますので、その分応力も変化しているはずですから、
$$ \tau_{xy}+\displaystyle\frac{\partial \tau_{xy}}{\partial x}\Delta x \tag{2}$$
と表すことができます。したがって、応力が生じている面積\(\Delta y \Delta z\)を掛けて荷重とし、中心のz軸からの距離\(\frac{\Delta x}{2}\)を乗じてモーメントとすれば、
$$ \left( \tau_{xy}+\displaystyle\frac{\partial \tau_{xy}}{\partial x}\Delta x \right) \Delta y \Delta z \displaystyle\frac{\Delta x}{2} \tag{3}$$
となります。
同様に、赤色のせん断応力について考えると、左側の面に生じる応力を\(\tau_{yx}\)とすると、右側の面に生じる応力は
$$\tau_{yx}+\displaystyle\frac{\partial \tau_{yx}}{\partial y}\Delta y \tag{4}$$
となりますから、応力が生じている面積(\Delta x \Delta z)を掛けて荷重とし、中心のz軸からの距離\(\frac{\Delta y}{2}\)を乗じてモーメントとすれば、それぞれ、
$$\tau_{yx} \Delta x \Delta z \displaystyle\frac{\Delta y}{2} , \\ \left( \tau_{yx}+\displaystyle\frac{\partial \tau_{yx}}{\partial y}\Delta y \right) \Delta x \Delta z \dfrac{\Delta y}{2} \tag{5}$$
となります。
緑色の応力と赤色の応力とは向きが逆ですから、モーメントがつり合うということは、これらの差が0になるということですので、
$$ \tau_{xy} \Delta y \Delta z \displaystyle\frac{\Delta x}{2}+(\tau_{xy}+\displaystyle\frac{\partial \tau_{xy}}{\partial x}\Delta x) \Delta y \Delta z \displaystyle\frac{\Delta x}{2} \\ \hspace{50pt} -\tau_{yx} \Delta x \Delta z \dfrac{\Delta y}{2}-(\tau_{yx} – \displaystyle\frac{\partial \tau_{yx}}{\partial y}\Delta y) \Delta x \Delta z \displaystyle\frac{\Delta y}{2}=0 \tag{6}$$
という式が成り立ちます。
これを展開してまとめると、
$$ \begin{align} \require{cancel} \tau_{xy} \Delta y \Delta z \displaystyle\frac{\Delta x}{2}+\tau_{xy} \Delta y \Delta z \displaystyle\frac{\Delta x}{2}+\displaystyle\frac{\partial \tau_{xy}}{\partial x}\Delta x \Delta y \Delta z \displaystyle\frac{\Delta x}{2} \hspace{80pt} \\ -\tau_{yx} \Delta x \Delta z \displaystyle\frac{\Delta y}{2} – \tau_{yx} \Delta x \Delta z \displaystyle\frac{\Delta y}{2} – \displaystyle\frac{\partial \tau_{yx}}{\partial y}\Delta x \Delta y \Delta z \displaystyle\frac{\Delta y}{2} &= 0 \\ \tau_{xy} \cancel{\Delta x \Delta y \Delta z} + \displaystyle\frac{\partial \tau_{xy}}{\partial x} \cancel{\Delta x \Delta y \Delta z} \displaystyle\frac{\Delta x}{2} – \tau_{yx} \cancel{\Delta x \Delta y \Delta z} – \displaystyle\frac{\partial \tau_{yx}}{\partial y} \cancel{\Delta x \Delta y \Delta z} \displaystyle\frac{\Delta y}{2} &= 0 \\ \tau_{xy} + \displaystyle\frac{\partial \tau_{xy}}{\partial x} \displaystyle\frac{\Delta x}{2} – \tau_{yx} – \displaystyle\frac{\partial \tau_{yx}}{\partial y} \displaystyle\frac{\Delta y}{2} &= 0 \end{align} \tag{7}$$
ここで、\(\Delta x\)、\(\Delta y\)、\(\Delta z\)は実際には極めてゼロに近い微小体積を考えていますので、極限を取りますと、偏微分の項はゼロになります。よって、
$$\tau_{xy}=\tau_{yx} \tag{8}$$
となります。これを、他のせん断応力のペアについても同様に適用すると、
$$ \begin{align} \tau_{xy} &= \tau_{yx} \\ \tau_{xz} &= \tau_{zx} \\ \tau_{yz} &= \tau_{zy} \end{align} \tag{9}$$
となります。
よって、応力テンソルは、このように6つにまとめることができます。
$$ \{ \sigma \} = \displaystyle\left\{ \begin{array}{c} \sigma_x \\ \sigma_y \\ \sigma_z \\ \tau_{xy} \\ \tau_{yz} \\ \tau_{zy} \end{array} \displaystyle\right\} \tag{10}$$
突然行列の形になりましたが、今後も行列で書いた方がわかりやすいので、ここから行列で表すことにします。
以上のことを念頭に、次は、応力テンソルの場合のひずみを求める準備として、Dマトリクスというものを求めます。
